One of the problems in surveying a forest is that the trees tend to get in the way. Terrestrial laser scanning (TLS) can zap trees rapidly but, using a static station, closer trees can obscure more distant trees. Mobile laser scanning (MLS) gets around this problem by allowing the surveyor to new viewpoints. These surveys can produce millions of points capturing the environment in 3D to an accuracy in the millimetre range. A difficulty is taking these many data points into models of trees. Bienert and colleagues have developed a new algorithm to help make sense of all the points.
“Algorithms for full tree and tree crown segmentation from MLS data are only available for urban trees. Urban environments are usually characterised by a single-row arrangement of roadside trees parallel to the MLS system trajectory and thus provide a clear view of the trunk and crown space,” write Bienert and colleagues. They add that the isolation of urban trees makes tracking their stems and branches much easier than in the wild. “The goal of our study was to present a novel segmentation algorithm for MLS data sets and to investigate its quality and accuracy for processing a large MLS dataset of a natural mixed forest.”
The team of botanists went to the Lauerholz Forest in northern Germany. They took a Riegl VMX-250 Mobile Mapping System and attached it to the top of a van to scan the forest. They drove the van both ways along the forest tracks to reduce the effects of shadowing. The set-up allowed the team to gather 3.73 billion data points in under two hours.
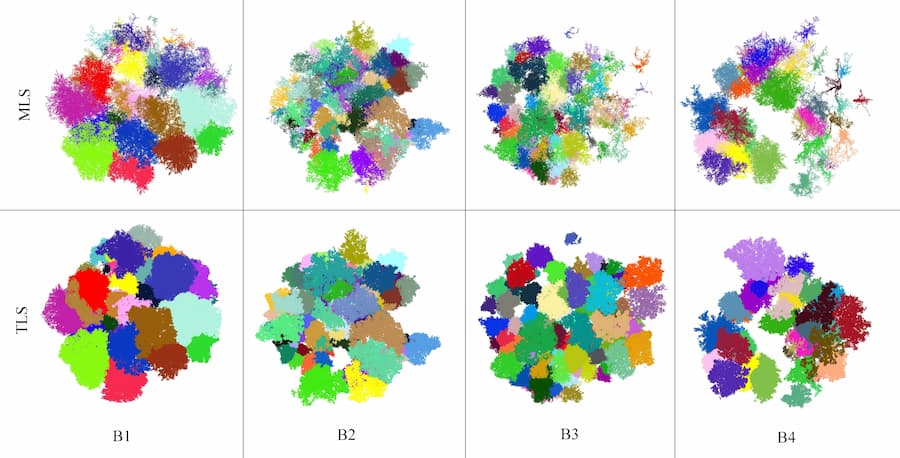
They then took this data and examined how the scan distance from the scanner affected automated tree segmentation.
“Our analyses of the entire study area showed that the canopy heights and tree positions can be derived for more than 50 % of the trees up to a distance of 30 m to the right and left of the forest track. From this, in turn, it was possible to determine the forest compartment boundaries in terms of stem number and height distribution,” write the authors.
The algorithm doesn’t rely on one specific system to work. Bienert and colleagues write that the method “…is independent of the mobile laser scanning system and works with a point cloud (X, Y, Z) and a trajectory in format (time, X, Y, Z). Thus, in theory any LiDAR system with a trajectory-based terrestrial scan can be used. Since the segmentation algorithm has no restrictions regarding tree size, even smaller objects (understorey vegetation) were detected and segmented. Hence, the number of segments obtained is higher than the number of actual trees in the stand.”
Some of those smaller objects in the study included walkers, but these were eliminated (from the data) by setting the segmentation parameters.
While using mobile laser scanning doesn’t remove all the problems of occlusion of trees by closer trees, Bienert and colleagues believe their method will allow much data processing. They add that surveyors can fill in any difficult patches with personal laser scanning systems.